
Team Members

Jacob Elorrieta, Mahzen Babekir, Mason Fields, Melanie Herrera, Ayrton Howard, Matthew Jeffries, Nicolas Kraemer, Raphael Moise, Matthew Stutzman, Grant Trautweiler
Abstract
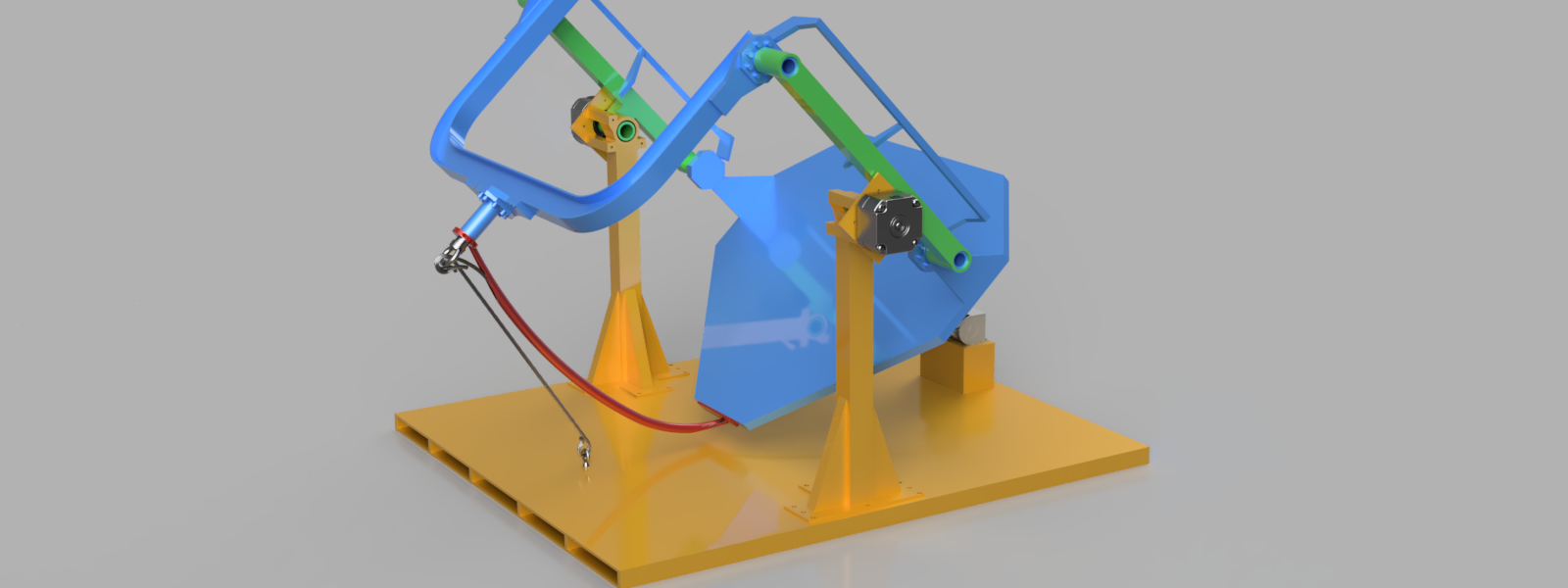
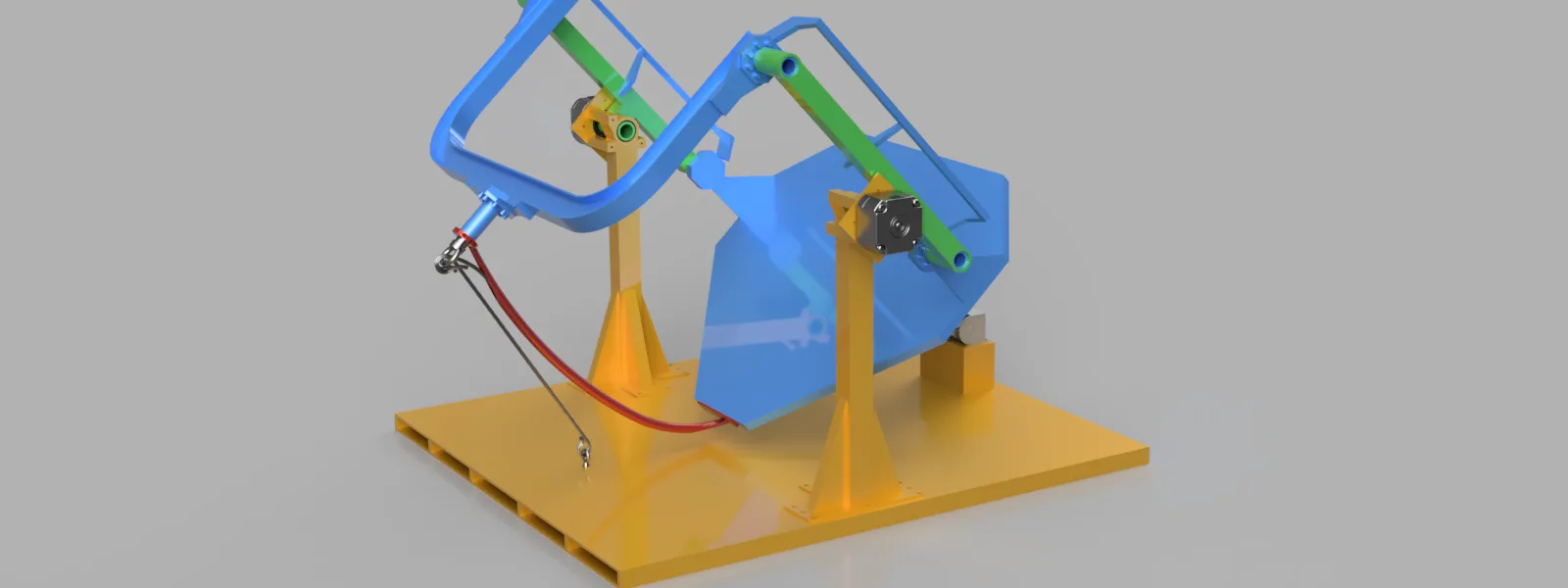
The objective of group 8’s design was to create something unique that maximizes payload visibility and is configurable in various locations. The end result is a design in which rotation is operated by a winch to configure the display from 0° to 90° with pegs on the vertical supports to prevent the display from over-rotation. This display relies on placing the center of gravity away from the vertical supports to naturally rotate the display upwards so that the winch will only need to operate in one direction (to pull it downwards). Rotary dampers are directly attached to the axis of rotation (the trunnion connectors) to ensure the rotation speed is safe during operation. The rotary dampers also act as a safety feature in the unlikely event that the winch cable snaps during rotation since it will slowly bring the display back to its vertical position. An enclosed cable guide was inserted at the center trunnion to prevent the winch cable from contacting the Astro payload as well as to keep the cable in a constant location to prevent additional forces from the winch to rotate the display. To lock the display in set locations, different lengths of cable can be directly attached from the baseplate to the center trunnion for specified rotation positions. Additionally, for ease of transportation, the baseplate is designed with slots for direct forklift interaction.
Pitch Video
3D Interactive Product Model
The following is an interactive 3D model of the product design. You can view and rotate the product assembly in different orientations and views, including an exploded view to see the various parts that make up the assembly.