

Team Members

Nathaniel Braswell, David Woods, Sanjeev Radhakrishnan, Sean Ng, Jacob Neff, Chase Eskridge, and Donald Luchetti
Abstract
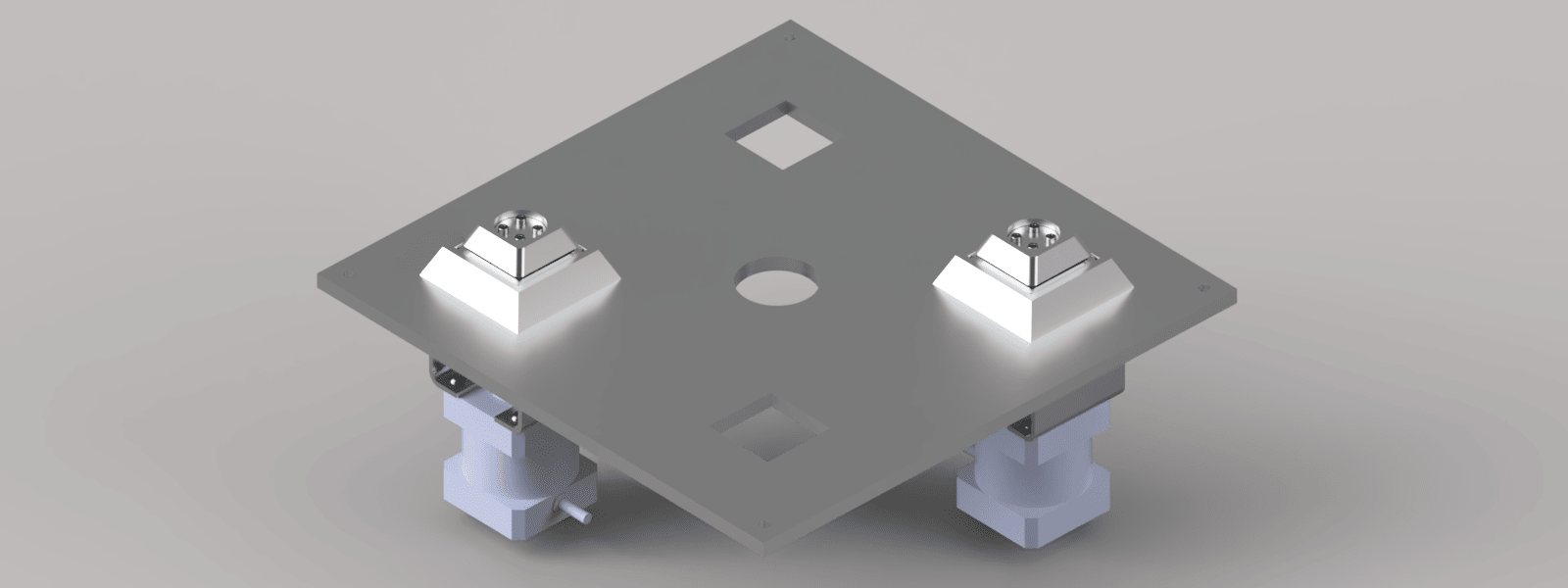
We were selected to design a docking system capable of rigidly connecting two CubeSats in deep space. The main idea behind the docking system is to attach two CubeSats together so that the more critical CubeSat could have its project life extended. Tight volume and weight requirements mean that CubeSats can only carry so much fuel upon initial launch. Our design solves this problem by creating a rigid connection that allows for fuel, data, and power transfer between CubeSats. Our docking system implementation is broken down into a passive and active side with various different subassemblies. The passive side of the design is a metal plate that will be bolted on to the z-face of the first CubeSat, likely to be the CubeSat conducting an important scientific mission. The passive plate has two conical volumes for locking with the active side, two square cutouts for data and power transfer, and one circular cutout for fuel transfer. The active side of the design is controlled by two space grade stepper motors that operate at low speeds. Attached to the shaft of the stepper motors are two locks responsible for rigidly attaching the two CubeSats. The locks are reliant on an angled interface between the lock and the passive plate. When the motor is activated, the lock will turn until it has displaced over the 1.7mm interface and reached the fully locked position. This lock will remain in place without actively using any power until it is desirable for undocking of the CubeSats to occur.
Pitch Video
3D Interactive Product Model
The following is an interactive 3D model of the product design. You can view and rotate the product assembly in different orientations and views, including an exploded view to see the various parts that make up the assembly.