

Team Members

Nathaniel Fuller, Madysen Wiley, Emma Cushing, Rachel Gallagher, Eduardo Artiles, Josh Hebert, Jake Pratt, Garrett Page, Raphael Moise
Abstract

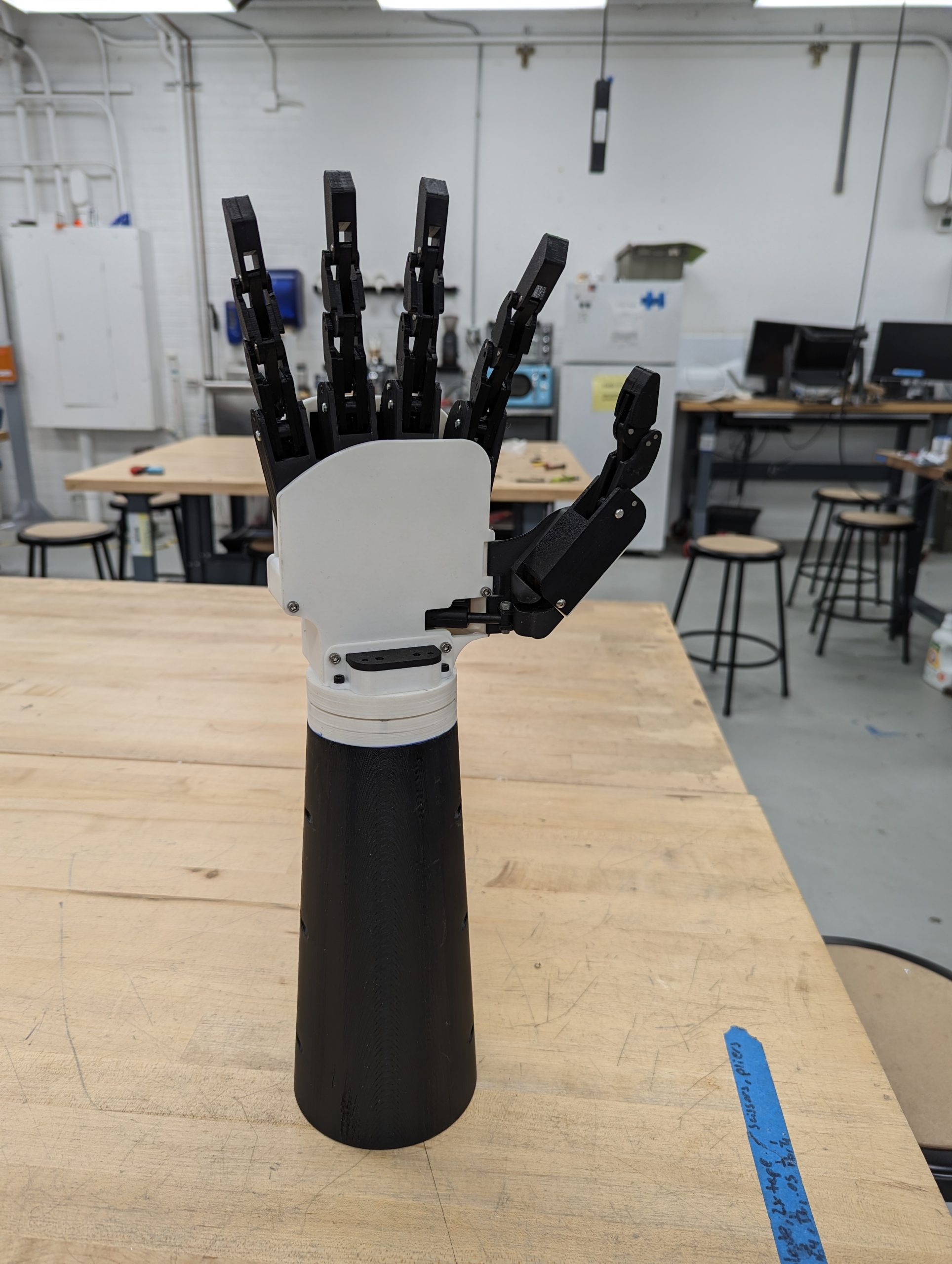
The goal of TechARM™ is to empower users with limb differences to regain their independence and individuality. The solution will specialize in adapted grips that include a variety of motions to complete everyday tasks. Our product includes 4 unique features: adduction/abduction, an AI-enabled proximity distance sensor, manual wrist rotation, and an adjustable forearm cinching mechanism. The distance sensor will create a grip as it senses objects approaching the palm, requiring no input from the user. TechARM™ will be targeting adults who desire advanced prosthetics at a low cost as well as those in developing countries as our product will decrease in cost per unit over time. Our product will not only include a variety of grips for function and customizations for appearance and fit, but it will also contain a maintenance kit. This kit will include a 6-32 Allen wrench, extra dual lock tape, and additional padding for the bicep attachment for the user to adjust and fix the product at their convenience. TechARM™ prides itself on designing intuitively to highlight the capability and independence of the user.
Pitch Video
3D Interactive Product Model
The following is an interactive 3D model of the product design. You can view and rotate the product assembly in different orientations and views, including an exploded view to see the various parts that make up the assembly.